Les servos moteurs sont des actionneurs fantastiques si l'on sait les commander. Le coût est en proportion de leur qualité. Ceux utilisés par Pupuce peuvent se trouver à un prix avoisinant les 70F l'unité ( 10 € ).
La disponibilité d'un atelier de circuits imprimés et de logiciel de CAO permet de fabriquer des éléments en époxy assez précis. De plus, la faible taille des éléments réalisés évite d'employer un matériau plus rigide et plus compliqué à travailler. Le parallélogramme déformable permettant le mouvement latéral et vertical des pattes a donc été réalisé dans cette matière.
Plus critiquables sont les axes de rotation réalisés avec des boulons, rondelles et écrous nilstop de 4mm. Le serrage des écrous est assez délicat puisqu'il faut un compromis entre liberté de mouvement et jeux de fonctionnement. Fort heureusement, ces jeux n'altéraient pas trop la reproductibilité des mouvements. Si vous avez une idée simple et plus satisfaisante, ce serait sympa de nous la communiquer.
Patte
gauche vue de face

La même de 3/4 dos

La même 3/4 face

Comme on peut le constater sur les images, un minimum d'usinage est nécessaire. L'intérêt de la construction d'un robot à pattes est de pouvoir fabriquer exactement les mêmes pièces plusieurs fois au lieu d'usiner une pièce spécifique à chaque fonction. En réfléchissant un peu, on a eu besoin de ne fabriquer que trois types de pièces :
- fixations de rails ( x6 )
- montants de fixation de servo à monter sur la pièce précédente ( x12 )
- pattes ( x6 )Les 3 seules types de pièces usinées de Pupuce ( avec un gros clin d'oeil à notre sponsor )
Les ajourages de la patte nous ont permis de gagner 100g
et perdre 2 jours d'usinage à la machine à outils ( pas numérique )
Reste la partie de commande en translation, actionnée par un servo plus musclé ( 15kg.cm ). Ce montage, tout droit hérité des Pacific 231, permet de faire avancer la patte centrale droite et les deux pattes extrêmes gauche en faisant reculer de la même distance l'autre groupe de pattes ( vive les chapes de modélisme ). Ce système serait à améliorer car ce type d'architecture décentre le gros servo ( qui pèse son poids ) donc décentre aussi Pupuce qui par conséquent ne marche pas droit ( malgré les contrôles d'alcoolémie ).
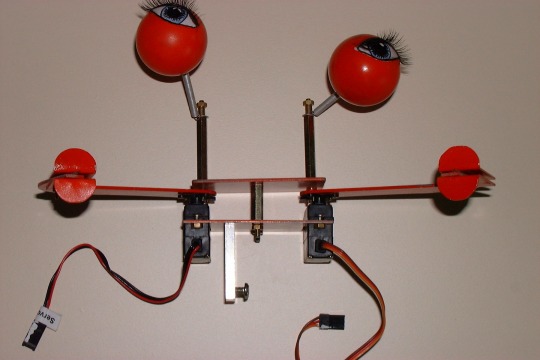
A la coupe de France de robotique 2000, un système de perçage de ballon était nécessaire. Une paire de mandibules avec 2 micro-servos ( trop fragiles et trop chers ), 2 plaques d'époxy, 2 lames de scalpel et le tour est joué. Il est de bon ton de rajouter deux gros yeux bleus langoureux afin d'amadouer l'adversaire ( et ça marche ! ).