PRINCIPE
Tiens, pour information, ce principe n'est plus brevetable
ROBOTS CONVENTIONNELS
La plupart des petits robots hexapodes vus à la télévision ou sur le web sont basés sur le même principe :
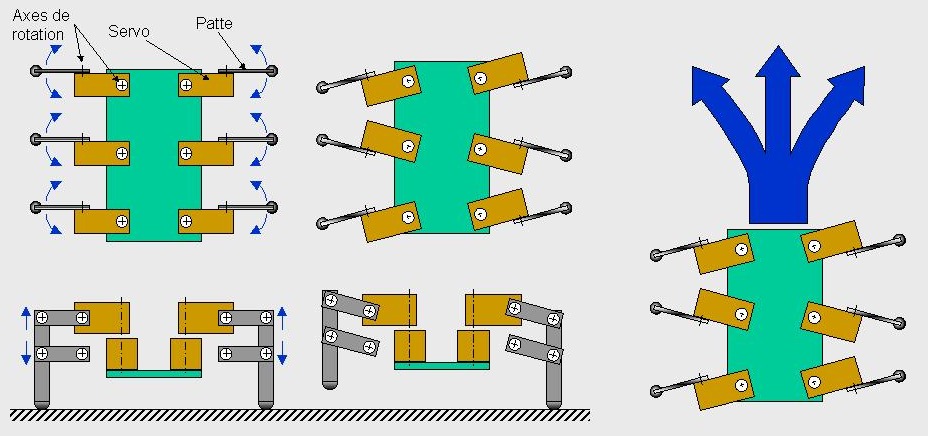
- 6 pattes ( forcément ! )
- 2 servos par pattes : un pour monter-descendre la patte l'autre pour la rotation
Le déplacement est alors assez semblable au cafard : ligne droite ou virage, en fonction d'une gestion subtile des pattes.
PUPUCE
Un robot marcheur a toutes les chances d'être plus lent qu'un robot rouleur. Or, pour la coupe de robotique, le temps de match est limité à 1mn30. Dans le cas d'une architecture conventionnelle le changement de direction ( une rotation à 90° par exemple ) risque d'être trop lent. De plus, la place nécessaire pour effectuer cette rotation n'est pas négligeable.
Après moult cafés et réflexions fumeuses, la solution adoptée pour un déplacement plus rapide est la combinaison d'une marche avant-arrière avec une marche en crabe.
- Pour avancer droit, on peut utiliser un mouvement de translation de 3 pattes par rapport aux 3 autres.
- Pour la marche en crabe, les pattes sont articulées par un parallélogramme déformable
- Effet de bord : nous nous sommes aperçus par la suite qu'une rotation sur place était aussi possible ( ce qui nous a bien aidé pour les matchs )


