Reste à gérer tous ces servos sans se prendre les pieds dans le tapis.
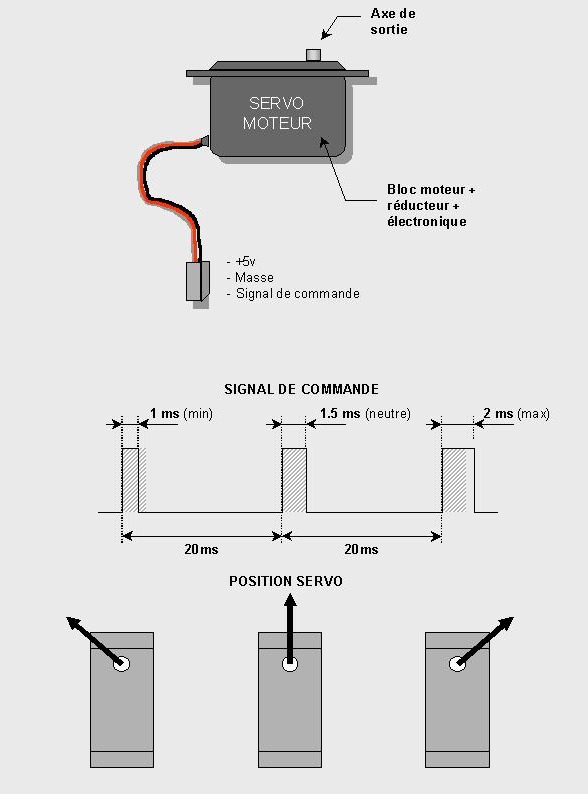
Un servo moteur standard a un débattement d'environ 100 degrés ( plus c'est parfois possible mais ce n'est pas grave, on en a pas besoin d'autant ). Il s'alimente généralement en 5V et se contrôle avec une variation de créneaux à 50hz, de largeur variable.
Un petit
schéma valant mieux qu'un long discourt
En ayant à l'esprit la gestion des 15 servos de Pupuce, il faut un moyen simple pour les commander.
-
Tout d'abord, on n'est pas obligé d'avoir une multitude de
positions possibles pour chaque servo.
- La gestion de 15 timings différents avec un micro-contrôleur ou un
PC débouche inévitablement sur une usine à gaz !
- Ne pas hésiter à utiliser les moyens que l'on a ( surtout
s'ils ne sont pas ridicules )
La solution retenue consiste à générer les timings avec un circuit logique programmable relié au port 8 bits d'une mini carte PC. La carte PC fourni le numéro de servo ( sur 4 bits ) ainsi que son débattement ( sur 4 bits ) au circuit logique qui gère les timings.

Au niveau d'un FPGA, losrque la commande d'un servo est dévellopée sur un logiciel de CAO, il suffit de faire 15 fois copier / coller, de remplacer quelques labels et le tour est joué. Pour donner une idée, la conception de la commande de servos a été finalisée en moins d'une semaine. ( schémas logiques + schémas électroniques )
Quand à la carte PC utilisée, elle possède 512Ko de mémoire flash ( pas besoin de disque dur ). Le système d'exploitation est un DOS intégré ( boot en 1/10ème de seconde ). Le développement informatique se fait sur un PC annexe, puis le programme est compilé et l'exécutable téléchargé par une liaison console dans la mémoire flash.
Vu de dessus, le FPGA,
son UVPROM de configuration, l'alim et les connecteurs de servo et d'accu
( noter en bas à droite, l'interrupteur d'urgence )

Vue de dessous, la carte
PC avec les câbles de liaisons à la carte principale
Très
belle vue sur la goupille de démarrage



